Abbildung 1: Auf der Grundlage des PikeOS-Mikrokerns können verschiedene Betriebssysteme und Anwendungen mit strikter Trennung ausgeführt werden
Hardware- und Softwaresysteme in Fahrzeugen sind historisch bedingt fragmentiert. Die Einführung elektronischer Systeme erfolgte in der Regel völlig unabhängig von anderen Systemen, was zu einem Wildwuchs bei CPUs und Controllern und vor allem bei der Software führte. In den heutigen Fahrzeugen steuern zwischen 60 und 100 verschiedene CPUs mit ihren eigenen Softwareanwendungen verschiedene Funktionen wie Motorsteuerung, Beleuchtung und Bremsen. Diese CPUs sind zudem über bis zu sieben verschiedene Busse miteinander verbunden. Eine solche Komplexität erhöht die Entwicklungs- und Produktionskosten und macht auch die Wartung nicht einfacher.
Mehrere Hardwareplattformen erfordern daher auch unterschiedliche Entwicklungsumgebungen und Softwareentwickler mit entsprechendem Know-how, was einen erheblichen Kostenfaktor darstellen kann. Darüber hinaus ist es natürlich das Bestreben eines jeden Herstellers, die Hardwarekosten zu senken und die Funktionalität zunehmend in die Software zu verlagern (d.h. das Software Defined Car). Eines der Hauptziele bei der Entwicklung des Autos der Zukunft ist daher die Einführung einer einheitlichen Plattform, die alle Fahrzeugfunktionen steuert.
Trotz aller Probleme, die der Wildwuchs an CPUs mit sich bringt, hat sie einen großen Vorteil: Sie trennt die einzelnen Funktionen, so dass kein System durch Fehler in einem anderen System beeinträchtigt werden kann. In heutigen Autos kann das Audiosystem unter keinen Umständen die Bremsen beeinflussen, da beide von streng getrennten Systemen gesteuert werden. Werden solche unterschiedlichen Systeme auf eine einheitliche Hardwareplattform migriert, ist diese Trennung nicht mehr von vornherein gewährleistet und muss daher auf andere Weise erreicht werden. Im Flugzeug- und Eisenbahnbau ist dieses Problem bereits weitgehend gelöst, und die dort verwendeten Ansätze lassen sich auch auf die Automobilindustrie übertragen.
Hypervisoren trennen Anwendungen
Viele Softwareanbieter nutzen Hypervisor-Technologien, um mehrere Betriebssysteme auf einer einzigen Hardwareplattform laufen zu lassen. Dabei handelt es sich um eine Virtualisierungstechnik, bei der Hardwarefunktionen zum gleichzeitigen Betrieb von Gastbetriebssystemen genutzt werden. Jedes dieser Gastbetriebssysteme verfügt über eine von allen anderen Betriebssystemen strikt getrennte Partition, auch Container genannt, in der es unabhängig von allen anderen Systemen arbeitet.
Eine solche Architektur ist offensichtlich geeignet, um dem Ziel der Vereinheitlichung der Hardware-Plattformen näher zu kommen. In mehreren Partitionen kann der Hypervisor diverse Funktionen hosten, die bisher getrennte CPUs erforderten. Es muss jedoch unbedingt sichergestellt werden, dass die Software, die die Hypervisor-Funktionalität bereitstellt, auch tatsächlich eine strikte Trennung zwischen den Partitionen gewährleistet. Andernfalls kann es trotz einheitlicher Hardware-Plattform zu Wechselwirkungen zwischen kritischen und unkritischen Anwendungen kommen, wie im Beispiel mit dem Audiosystem und den Bremsen. An dieser Stelle kommen dann die Sicherheitszertifizierungen wie SIL 4 und ISO 26262 ins Spiel. Solche zertifizierten Hypervisor-Technologien geben die Gewissheit, dass die Funktionen in verschiedenen Partitionen wirklich voneinander getrennt sind, als ob sie auf verschiedenen CPUs laufen würden.
Multi-Core-CPUs
Ein weiterer beliebter Ansatz zur Erreichung dieses Ziels ist der Einsatz von Multi-Core-CPUs. Obwohl solche CPUs in erster Linie aus Leistungsgründen eingesetzt werden, können sie auch die erforderliche Trennung der einzelnen Funktionen unterstützen. Allerdings ist die Zertifizierung von Multi-Core-Systemen sehr komplex, da viele zertifizierte Systeme tatsächlich nur einen Kern verwenden, was den eigentlichen Grund für den Einsatz von Multi-Core-CPUs, die Leistung, konterkariert. Darüber hinaus ist die Trennung der Funktionen somit nicht gewährleistet. Wenn verschiedene Funktionen in einem einzigen Stück Software gebündelt werden, das in einem Echtzeitbetriebssystem (RTOS) auf nur einem CPU-Kern läuft, kann es sehr leicht zu Interferenzen zwischen den Funktionen kommen. Die Auswirkung einer Anwendung auf das Laufzeitverhalten einer anderen Anwendung kann zu Sicherheitsproblemen führen, z. B. zur Überschreitung von Zeitlimits bei Echtzeitanwendungen. Ebenso können Timing-Effekte aufgrund der gemeinsamen Nutzung von Systemressourcen, z. B. Cache- und Speicherbussen, zu versteckten Informationskanälen führen, die die Vertraulichkeitsanforderungen der Anwendung verletzen. Wenn kritische Funktionen jedoch auf verschiedene Kerne verteilt sind, ist die erforderliche strikte Trennung gewährleistet.
Der Einsatz von Hypervisoren auf Multi-Core-Systemen ist grundsätzlich ein geeignetes Mittel, um den Herausforderungen beim Systemdesign zu begegnen. Allerdings ist der Einsatz von Hypervisoren allein keine Garantie für eine strikte Trennung der verschiedenen Funktionen. Die meisten Hypervisoren befinden sich auf einer RTOS-Plattform, die von ihrem eigenen Design her eine solche Trennung nicht unterstützt. Gerade bei sicherheitskritischen Anwendungen ist es jedoch wichtig, dass das RTOS bereits speziell für die getrennte Ausführung der verschiedenen Funktionen ausgelegt ist, d.h. es handelt sich vom Design her eher um einen Separationskernel als um ein einfaches RTOS.
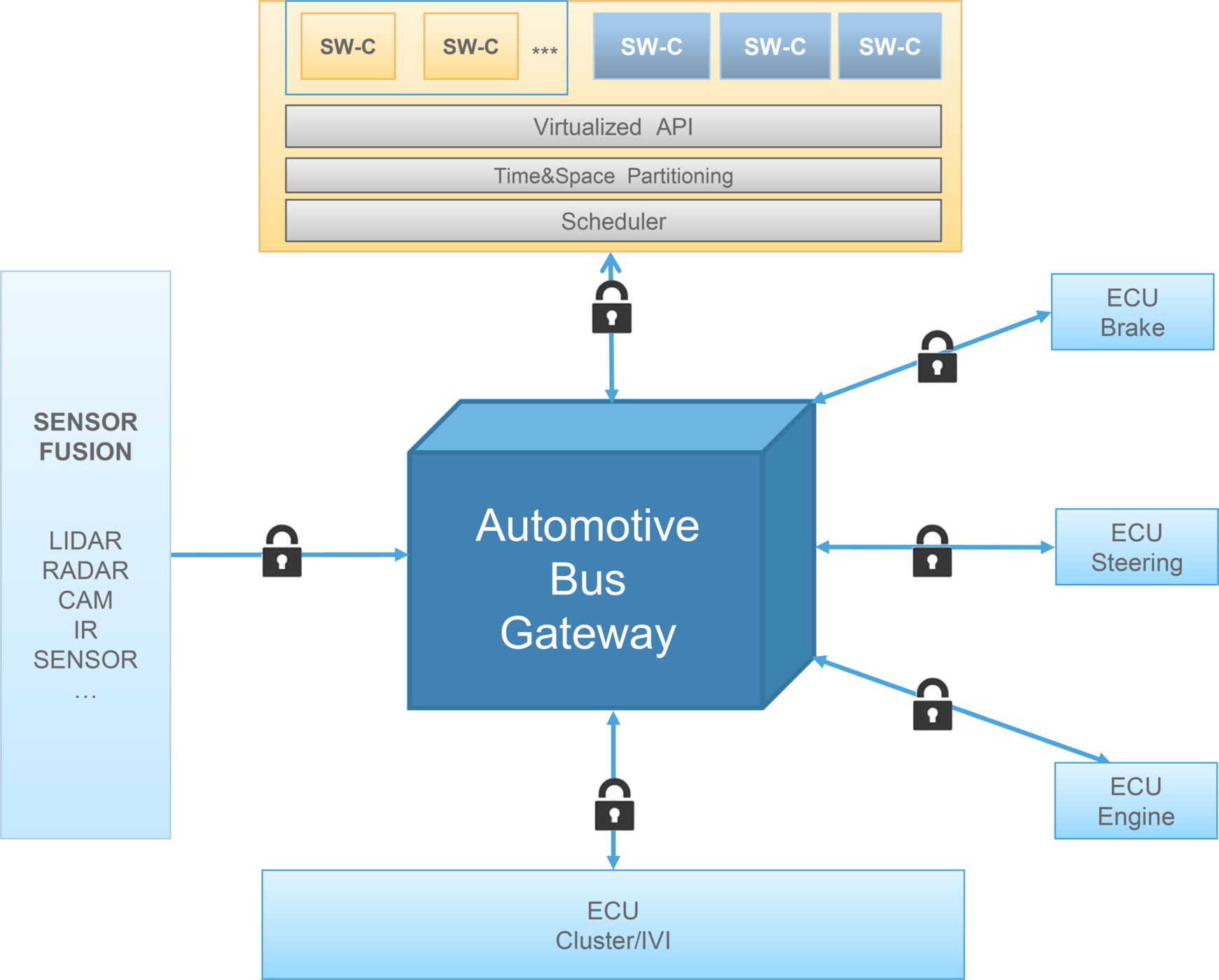
![[Translate to Deutsch:] Safe System Design with diverse Applications on one Hardware](/fileadmin/_processed_/a/2/csm_SYSGO_PA_2016-12_software_architecture_automotive_98b19ed90a.jpg)
 Twitter
Twitter LinkedIn
LinkedIn Facebook
Facebook Pocket
Pocket RSS
RSS