The KASS augmentation system significantly improves the localization of GPS receivers, making air traffic in particular safer. KASS includes a so-called Safety-of-Life (SoL) service that, among other things, makes landing procedures safer and supplements any existing instrument landing systems (ILS). The SoL service is a cost-effective alternative for airports that do not operate a cost-intensive ILS. SoL reports within a few seconds if positioning data is incorrect and thus provides decisive instructions for action. Although it is possible in principle to localize with centimeter accuracy without SBAS, this is neither possible in real-time nor when the aircraft is moving. With the help of KASS, satellite data for moving objects are corrected in real-time and freed from interfering factors as far as possible.
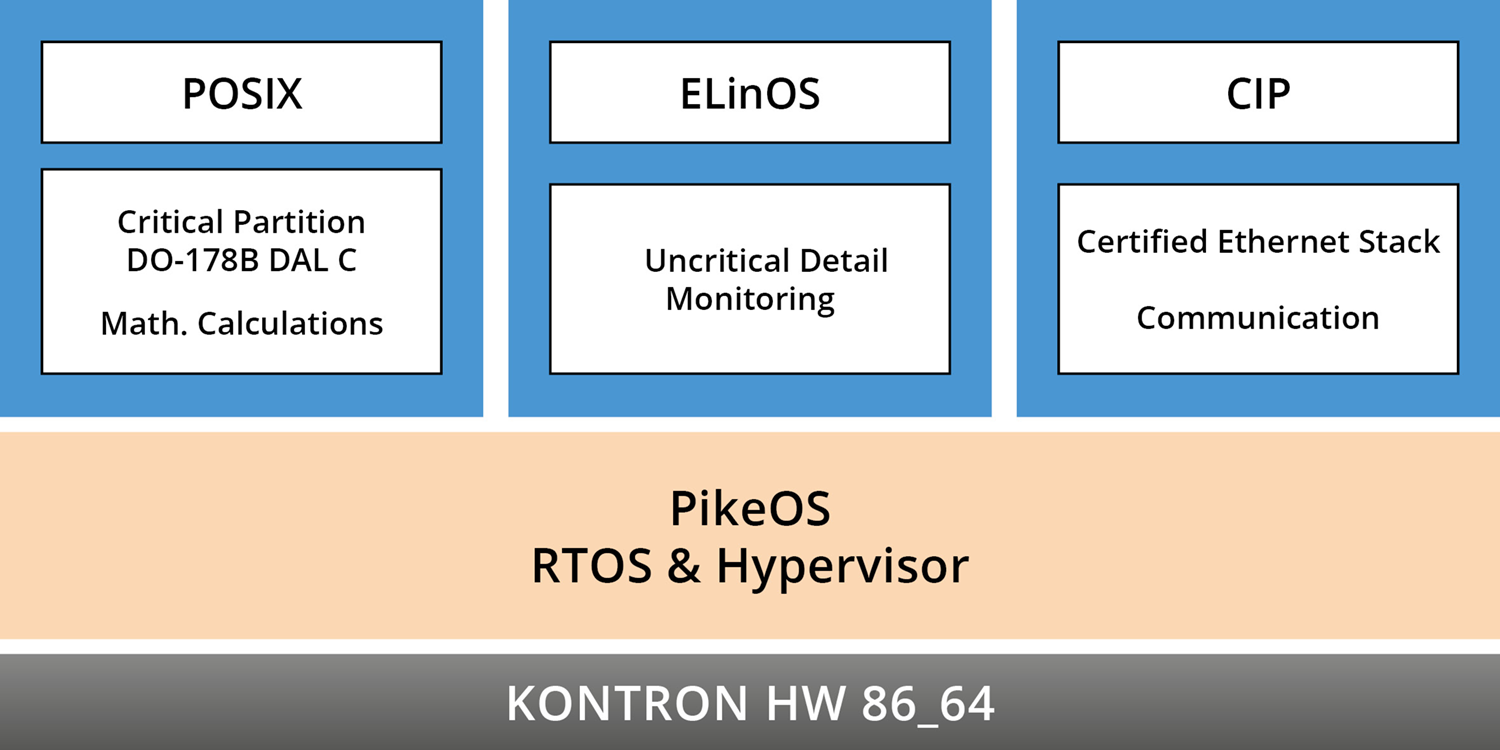
It was this requirement for safe real-time capability that was a key reason for Thales Alenia Space to choose SYSGO's hypervisor-based real-time operating system, PikeOS. PikeOS meets hard real-time requirements better than other real-time operating systems through sophisticated scheduling and multicore support that meets CAST32-A requirements. It is highly performant in virtualization tasks and reliably meets mixed criticality requirements, i.e. different safety levels per partition. This allows safety-critical tasks to be run with non-critical tasks such as monitoring on the same system. PikeOS has demonstrated its maturity in avionics certification projects on several occasions and was recently certified again in a DO-178 DAL A project.
Good to know:
Decca operated with an accuracy of around 200 meters, which was sufficient for shipping and was therefore still used until the year 2000 (although it had been in use since the Second World War). Via the first GNSS Transit I, which was still quite inaccurate but satellite-based, the path led to modern GNSS such as the American GPS or the European Galileo, which allow accuracies of a few centimeters in static use and up to 10 meters in motion and real-time.
Functioning of Global Navigation Systems like GPS and Galileo
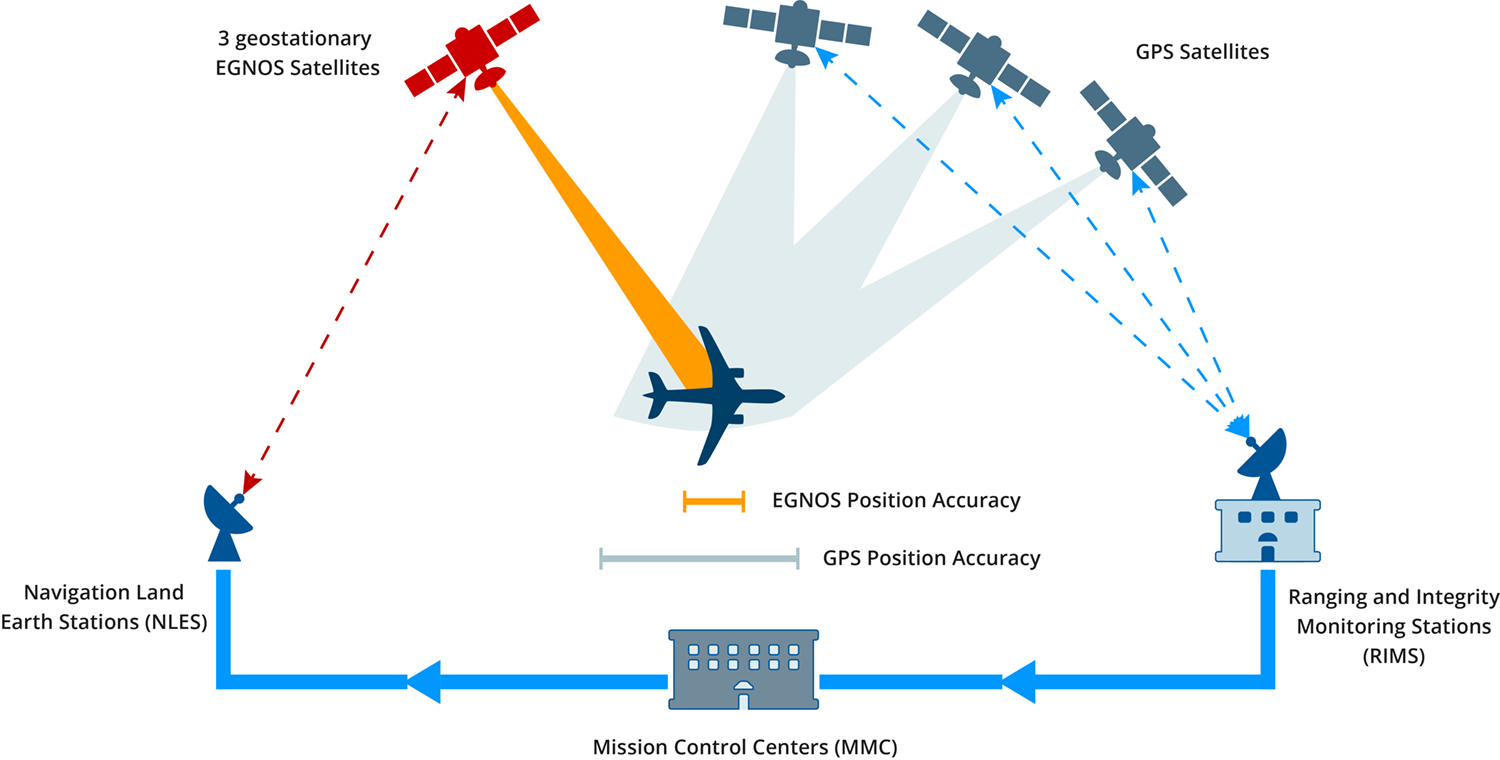
Without an augmentation system, GNSS such as GPS or Galileo operate on the principle of temporal positioning. The signals from their satellites - all in the same orbit around the earth - contain information about their position and the time at which the signal was sent. When the signal reaches a receiver on Earth, the receiver can use the time difference to determine how far away the satellite is. To determine the position of the receiver, additional satellites are needed to produce a radial intersection from which the exact position can be calculated. The more satellites are received, the more accurate the position.
The positioning is inaccurate for several reasons. First, the position of the satellites is constantly changing (they move at 4 Km/sec in their orbit around the Earth), and second, when the signal enters the ionosphere, it encounters particles that dissipate the signal when it enters the troposphere. Timing is also problematic because while satellites have atomic clocks, receivers generally have only quartz clocks. In addition, there are terrestrial obstacles such as mountains, houses or trees, which lengthen or shade the signal by redirecting it. The obstacles thus cause a temporal variance in signal reception, which results in the receiver calculating an incorrect route length.
KASS opens the Door to Precision for new Applications
In 2013, the South Korean government commissioned the Korea Space Research Institute (KARI) to build an SBAS for the Korean Peninsula. After years of planning, KARI engaged French aerospace company Thales Alenia Space (TAS) to create the Korea Augmentation Satellite System based on the European EGNOS system. In June 2022, South Korea has successfully launched a precision aviation satellite. As the the first satellite for KASS, the satellite will improve the accuracy and reliability of GPS signals for pilots, increasing the oveall airline flight safety. More satellites are to be planned.
Like EGNOS, KASS will operate on the principle of ground position correction: Base stations will be established across the Korean peninsula, and their known and unchanging position will be used to determine the exact distance in real-time between the station and the satellite. This works by matching the uncorrected GNSS signal (and the associated location determination) with the actual location. The difference between the calculated GNSS position and the actual location forms the basis for accurate positioning of receivers (also called rovers) within a radius of 100 kilometers. Within this range, the difference, or positioning error, is the same and thus allows receivers to position themselves much more accurately. The technique is called Differential GPS (DGPS) and, with many distributed stations, allows for improved positioning over a wide area.
 Twitter
Twitter LinkedIn
LinkedIn Facebook
Facebook Reddit
Reddit RSS
RSS Copy link
Copy link