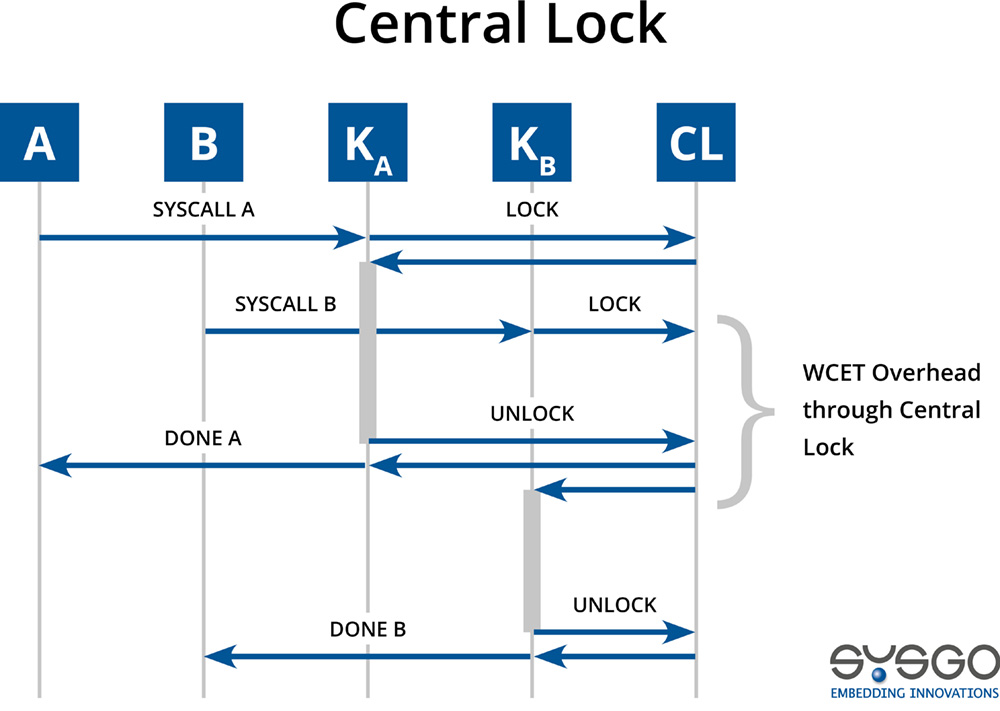
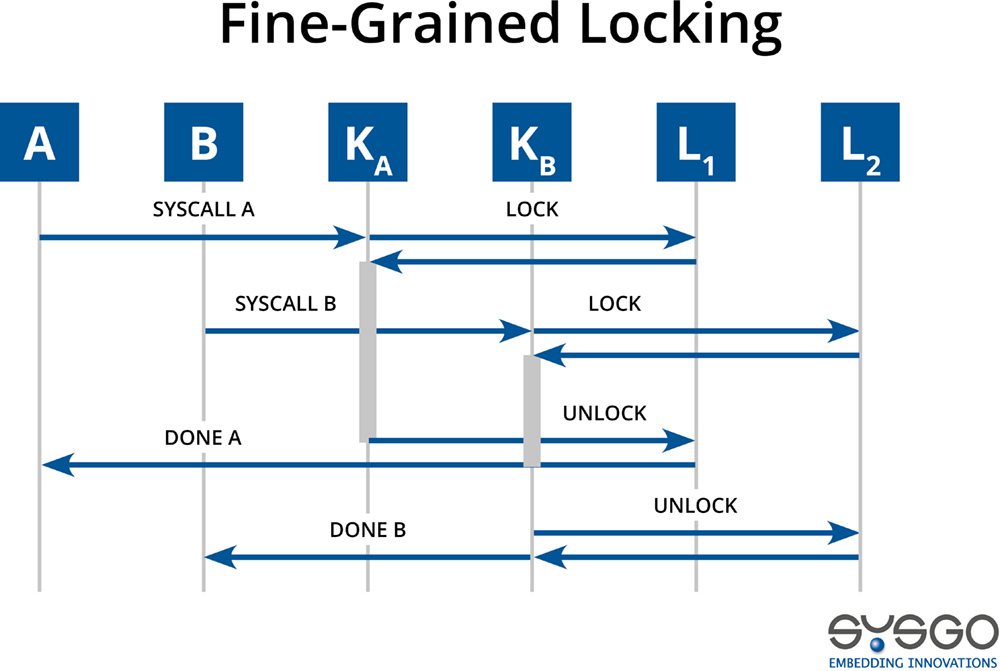
Figure 2 shows what happens when multiple, fine-grained locks are used. The procedure is essentially the same, except that the kernel requests different locks. In this scenario, the KB therefore does not need to wait for a central lock to be released. The situation is therefore largely symmetrical. The effect would be significantly amplified by the addition of further cores – in other words, a system with a central lock scales very badly.
It should be noted that, when resources have been explicitly divided between partitions, it is still possible that more than one core will request the same lock even when fine-grained locking has been used. This can be adjusted in detail in the configuration by the system integrator.
Linux operating systems have also previously undergone a similar development (for more information, see the history regarding removing the big kernel lock2). However, PikeOS has a micro-kernel with a codebase that is many times smaller. On the other hand, PikeOS has incorporated the partitioning concept directly into the kernel design, meaning that parts of the kernel memory are allocated exclusively to particular partitions and the resources are stored in the memory strictly according to partition and task. This has made defining the local locks easier.
In addition to the reduced WCET, dispensing with the central spinlock has resulted in improved performance because there is no longer any need to dedicate any processor time to active waiting and the application is therefore available directly.
Faster Certification thanks to verified Tools
Another important new improvement that comes with PikeOS 5.0 concerns the build system and the amount of work involved in certifying a complex system. The hypervisor concept enables multiple applications to be run on one machine. These applications are strictly isolated from one another by means of resource and time partition mechanisms. Dedicated communication channels are still possible, however. Segregated from one another, all applications exist in the form of completely separate files. Applications can be in the form of either an individual binary file native to PikeOS or a complex operating system with its own, separate file system. When the operating system starts up, config files are used to control which partition an application runs in, which resources are available and what files and file system they can access.
Two config files are available to the system integrator here:
1. The virtual machine initialisation table (VMIT): Configuration of all partitions, permission to access resources and communication channels
2. ROM file system configuration (RBX): Configuration of all (executable) files that are to be included in the ROM file system
Both config files are in XML format. The VMIT compiler and ROM image builder convert these files into binary format, which is read in and processed by a component of the PikeOS operating system during its runtime. The binary form was chosen because it is less resource-intensive and does not involve a complicated XML parser certification process. Certification does, however, require the correctness of the binary files to be verified. Until now, this involved a complicated process that required additional tools.
Additionally, any change to an XML file forces a repeat of the process. But with the release of PikeOS 5.0, a VMIT compiler and a ROM image builder are available as fully verified tools. This means that the correctness of the files can be established directly based on the original XML files. This considerably speeds up the certification workflow.
Further Improvements
PikeOS 5.0 also features the following new additions and adjustments:
- Faster access to kernel drivers
- All driver classes also available in the kernel space
- Supports file systems in the kernel space
- DAL-B certification kit available for PowerPC
- Partition callback hooks allow error counters to be implemented, in turn enabling security auditing
- The APEX API complies with the latest version of the ARINC 653 standard, Part 1 Supplement 5 and Part 2 Supplement 4 (December 2019).
- New BSP: i.MX 8 BSP
- Supports the ARMv8 generic interrupt controller (GIC) v3
SYSGO has its own Linux distribution called "ELinOS", which many customers use as a Linux partition directly on PikeOS. The following changes are available in ELinOS version 7 for PikeOS:
- Toolchain gcc v8.3
- binutils v2.31
- Linux Kernel 4.19 with real-time extensions
- Standard library glibc v2.2
- The host tools support 64-bit native versions on Windows and Linux
Version 7 of the "CODEO" development environment that is required for PikeOS and ELinOS features a number of changes that make it easier for the user to implement project configurations:
- The ROM file system is now easier to create.
- The validation can now be configured individually on a project-by-project basis
- The ROM structure of the PikeOS boot files can now be displayed.
- The structure of a binary virtual machine initialisation table can now be displayed in the XML format.
- GIT team support is included as standard
- The PikeOS monitor displays information about shared memories.
- Shared memories are automatically identified on a PikeOS target.
- New drag & drop view
»Ready for Take-off«
Version 5.0 of PikeOS boasts significant advancements in terms of both performance and scalability compared to the previous version. Access to kernel drivers is now faster and the system is significantly more scalable with regard to multi-core architectures thanks to the introduction of fine-grained locks. Additionally, all driver classes and file systems are now available in the kernel.
In terms of certifiability, PikeOS 5.0 complies with the CAST-32A position paper and is therefore ready for the use of multi-core processors in the aviation industry. The verified configuration tools make certification of complex systems easier and faster. A DAL-B certification kit is now available for the PowerPC architecture. Further architectures and further certification kits that comply with IEC 61508, ISO 26262 and EN 50128 will follow shortly.
 Twitter
Twitter LinkedIn
LinkedIn Facebook
Facebook Reddit
Reddit RSS
RSS Copy link
Copy link