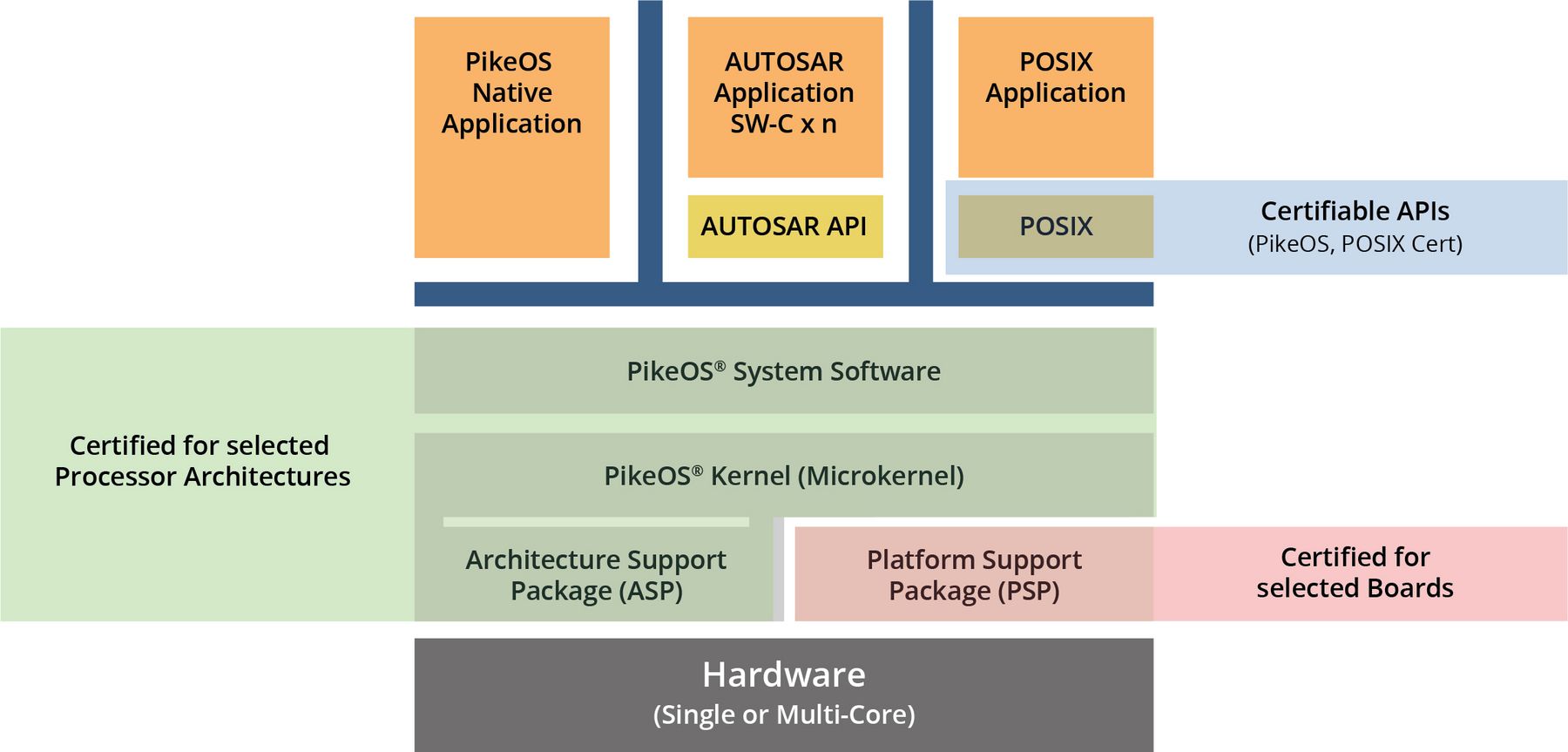
Figure 1: Based on the PikeOS microkernel, various operating systems and applications can run with strict separation
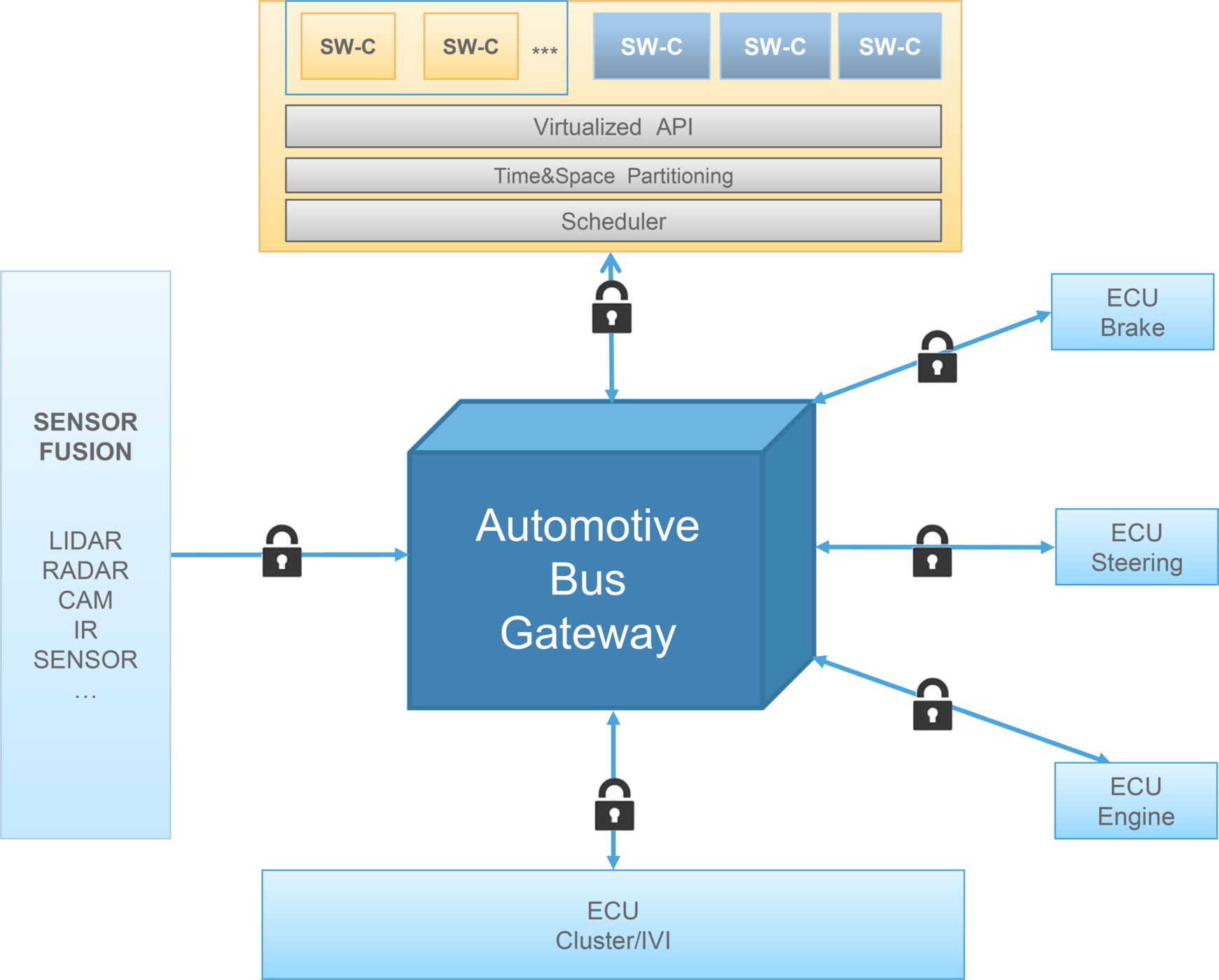
Hardware and software systems in cars are historically fragmented. The introduction of electronic systems usually took place completely independently of other systems, which led to an uncontrolled growth in CPUs and controllers, and especially in software. In today's vehicles, between 60 and 100 different CPUs control diverse functions, such as engine control, lighting and the brakes, with their own software applications. These CPUs are also interconnected by way of up to seven different buses. Such complexity increases the development costs and production costs and does not make servicing any easier either.
Multiple hardware platforms therefore also require different development environments and software developers with the respective expertise, which can be a significant cost factor. In addition, it is of course the endeavour of every manufacturer to reduce the hardware costs and shift the functionality increasingly to the software (i.e. the software defined car). One of the main objectives in the development of the car of the future is therefore the introduction of a uniform platform that controls all car functions.
Despite all problems that the uncontrolled growth in CPUs entails, it does have one big advantage: it separates the individual functions so that no system can be impaired by any errors in another system. Under no circumstances can the audio system affect the brakes in today's cars, because the two are controlled by strictly separated systems. If such diverse systems are migrated to a uniform hardware platform, this separation is no longer guaranteed from the outset and must therefore be achieved in other ways. In aircraft and railway construction this problem has already been largely solved and the approaches used can also be transferred to the car industry.
Hypervisors separate Applications
Many software suppliers use hypervisor technologies to enable several operating systems to be run on just one hardware platform. This is a virtualization technique that uses hardware functions to simultaneously operate guest operating systems. Each of these guest operating systems is provided with a partition that is strictly separated from all of the other operating systems, also called a container, in which it operates independently of all other systems.
Such architecture is obviously suitable for coming closer to the objective of unification of the hardware platforms. In several partitions the hypervisor can host diverse functions that previously required separate CPUs. However, it must be absolutely ensured that the software providing the hypervisor functionality does in fact guarantee strict separation between the partitions. Otherwise, although there is a uniform hardware platform, there may be interactions between critical and non-critical applications, as in the example with the audio system and the brakes. The safety certifications, such as SIL 4 and ISO 26262, then come into play at this point. Such certified hypervisor technologies provide the certainty that the functions in different partitions really are separated from one another as if they were running on different CPUs.
Multi-Core CPUs
Another popular approach for the achievement of this objective is the use of multi-core CPUs. Although such CPUs are primarily used for performance reasons, they can also support the required separation of the individual functions. However, the certification of multi-core systems is very complex, many certified systems actually using only one core, which foils the very reason for using multi-core CPUs, the performance. In addition, separation of the functions is therefore not guaranteed. If various functions are bundled into one single piece of software that runs in a Real-Time Operating System (RTOS) on just one CPU core, interference between the functions can occur very easily. The effect of an application on the run-time behaviour of another application can lead to safety problems, for example, the exceeding of time limits in real-time applications. Similarly, timing effects due to the joint use of system resources, for example, cache and memory buses, can lead to hidden information channels that infringe the confidentiality requirements of the application. However, if critical functions are spread over various cores, the required strict separation is guaranteed.
The use of hypervisors on multi-core systems is fundamentally a suitable means to meet the challenges encountered in system design. However, the use of hypervisors alone is not a guarantee for strict separation of the different functions. Most hypervisors are on an RTOS platform, which, as far as its own design is concerned, does not support such separation. Precisely in safety-critical applications, however, it is important that the RTOS is already designed specially for the separate running of different functions, i.e. as far as the design is concerned it is a separation kernel rather than a simple RTOS.
 Twitter
Twitter LinkedIn
LinkedIn Facebook
Facebook Reddit
Reddit RSS
RSS Copy link
Copy link